
蔡振华
武汉理工大学自动化专业本、硕,法国国立贝尔福蒙贝利亚技术大学工学博士,UTBM助理教授(Vacataire)。现任职于武汉理工大学自动化学院,入选江苏省“双创人才计划”、ICIICII国际会议“Outstanding Young Investigator Award”、“Early Achievement Award”等奖励。以第一或通讯作者发表SCI论文30余篇,主持或参与国家重点研发计划、航空科学基金、国家及省级自然科学基金、科技部国际合作项目以及湖北省科技支撑计划等十余项。荣获本科、研究生国家级及省级创新创业竞赛奖励20余项、国家级创新大赛优秀指导老师。

2014年于法国工程技术大学集团UTBM获得工学博士学位,曾任UTBM助理教授(Vacataire)
主持或参与科研项目(课题)及人才计划项目情况:
1. 国家自然科学基金,基于粒子沉积与传热机理的等离子喷涂机器人轨迹优化研究,结题,主持;
2. 湖北省自然科学基金,等离子喷涂机器人路径规划及优化关键技术研究,结题,主持;
3. 武汉理工大学自主创新基金,基于视觉引导的自主移动机器人定位及路径规划研究,结题,主持;
4. 广东省数字信号与图像处理技术重点实验室开放基金,基于深度CNN的快速目标识别与工业机器人智能抓取技术研究,结题,主持;
5. 武汉华威专用汽车检测有限公司企业委托,基于机器人主动柔顺控制的汽车零部件耐久性测试平台,结题,主持;
6. 国家科技部国际交流合作专项,汽车排放控制后处理系统控制技术联合研究,结题,主要技术负责人;
7. 武汉理工大学科学家平台建设项目,在研,主要技术负责人;
8.东风汽车公司技术中心,基于三维空间重构的视觉测量控制系统研发与应用,在研,主持;
9.中国电建武汉重型装备有限公司,机器人自动摘钩系统研发,在研,主持;
10.航空科学基金,激光增材修复熔池特征检测数字化处理方法与路径智能规划研究,在研,主持(与中国航空制造技术研究院合作申报)。
蔡振华博士的研究兴趣在于视觉测量与机器人控制技术,课题组研究工作聚焦于将工业机器人、三维视觉系统以及人工智能算法等进行多学科交叉融合以实现智能制造过程中的精细化和数字化加工,主要技术路线如下图所示:
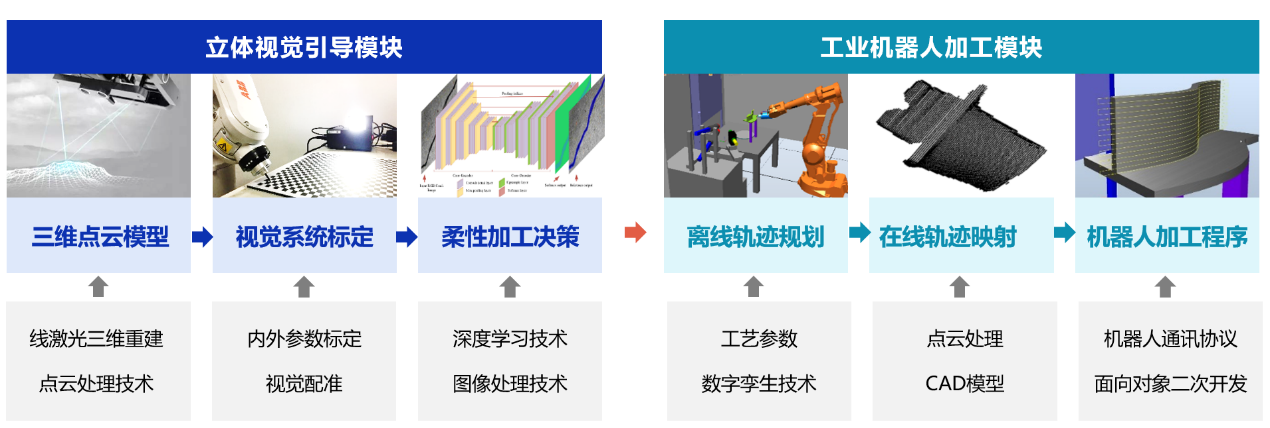
1. 三维逆向重建:通过点云处理技术中的点云滤波、特征描述与提取以及点云匹配、拼接等算法对加工对象进行曲面重构,将对象实物转化为三维数字模型。
2. 激光视觉系统参数标定:基于采样一致性原理对激光三维视觉传感器及标定球系统进行手眼标定,拟合标定矩阵并评估标定精度,从而建立相机坐标系中测量点云与世界坐标系中对象实体两者之间的空间数学映射关系。
3. 柔性加工决策:采用卷积神经网络等深度学习技术对视觉系统采集的RGB-D信息进行处理,驱动机器人进行异型物体的抓取位置预测、静态目标识别以及动态目标的快速检测,辅助系统在线生成实时加工决策。
4. 离线轨迹规划:通过数字孪生技术构建虚拟生产系统,在虚拟车间中对机器人及外设等生产设备进行实时仿真和参数优化,在智能制造模式下实现生产设备、中控系统以及生产过程的数字建模和智能化控制。
5. 轨迹在线映射:采用标定后的视觉系统进行三维在线测量,将实时点云与标准模板进行迭代配准,将计算结果反馈给机器人控制器用于补偿加工对象的位姿偏差。
6. 面向对象二次开发:采用C#等高级语言联合机器人库函数、点云PCL库等开发上位机综合管理系统,协同PLC系统进行全站动作逻辑、工艺流程管理及共享信息处理。
目前已在东方汽轮机、南方航发等军工、民用企业承接多个科研课题和开发项目,成果广泛应用于能源发电、航空航海等关系国计民生的重要领域,帮助其实现关键工序的智能化和数字化精密加工。课题组近期将主要聚焦航发叶片表面功能涂层的机器人精密加工以及基于高能束流的机器人增减材制造方向,并将视觉测量与机器人控制相关技术在以上两个方向进行方案匹配和产品落地。
